全国服务电话0755-82721850 |
搜索
|
桌面型机器人视觉定位解决方案

桌面型机器人视觉定位解决方案
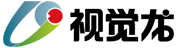
采用VDSR视觉传感器+VPAD视觉平板+SMC
分享到:
传统点胶机与视觉点胶机对比
传统的桌面式点胶机:常见的桌面型机器人结合的视觉系统基本都是PC系统,笨重且稳定性差,核心算法皆由国外大公司引进,需进行二次开发,难度大,不易使用。
视觉龙的点胶机视觉方案:纯嵌入式的桌面机器人视觉引导控制系统;摆脱了PC式的臃肿,体积小、稳定,成本低;解决了传统桌面式机器人需人工固定后才点胶的弱点;视觉定位,无需人工纠正;可进行二次开发,可为客户定制操作界面;为特定的工艺定制应用程序;配套软件DSRTPlus、VDSR_Check;用途广泛:可用于点胶机、打螺丝机、点焊机、贴标机。
视觉龙的点胶机视觉系统方案构成
用户使用界面
设定模式:设置向导、针头校正。
自动生产:生产操作、空位运行测试。
产品切换:多产品动态切换、加载。
程序模式:设置产品参数、点胶路径。
维护模式:运行状态、错误信息、标定操作。
视觉工具
标定:将视野像素单位转换为毫米单位,只需要先建好一个模板,点击“开始标定”即可。
收录产品信息:产品大小,通过收录单元信息、组信息、支架信息分别计算多个单元间的距离、组单元与组单元间的距离以及单元个数,整个支架的距离以及组个数。
录入点胶路径:相机检测到mark点之后,执行自定义点胶,支持多种路径类型,可进行单点灌胶、直线匀速喷胶。
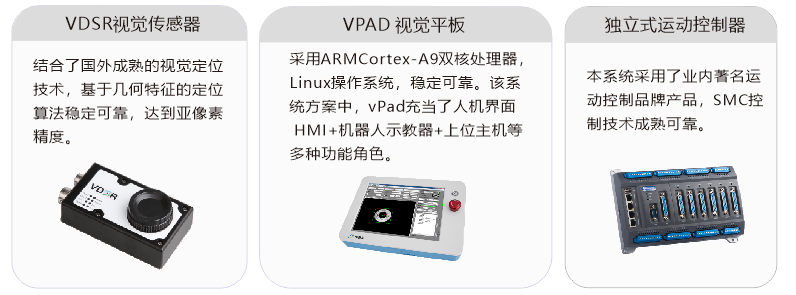
应用示例
上一个:
机器人行业3D视觉引导解决方案
下一个:
机器人行业2D视觉引导解决方案

Copyright © 2019 视觉龙 All Rights Reserved 深圳视觉龙智能传感器有限公司 粤ICP备12012923号